Beschreibung
Aktuelle Entwicklungen im Automobilbereich motivieren die Betrachtung von Kraftfahrzeugen, deren vier Räder separat angetrieben, gebremst und gelenkt werden können. In Bezug auf die Fahrzeugbewegung besitzen diese redundante Stelleingriffe, welche es der Steuerung und Regelung solch überaktuierter Fahrzeuge ermöglichen, sekundäre Optimierungsziele neben der Realisierung eines geforderten Bewegungsverhaltens zu verwirklichen. Aufgrund der Komplexität des resultierenden Gesamtsystems erweisen sich modellbasierte Methoden für den Entwurf einer geeigneten integrierten Fahrdynamikregelung als zweckmäßig, um die regelungstechnischen und fahrdynamischen Zielstellungen unter gleichzeitiger Berücksichtigung anwendungsrelevanter Randbedingungen zu realisieren.
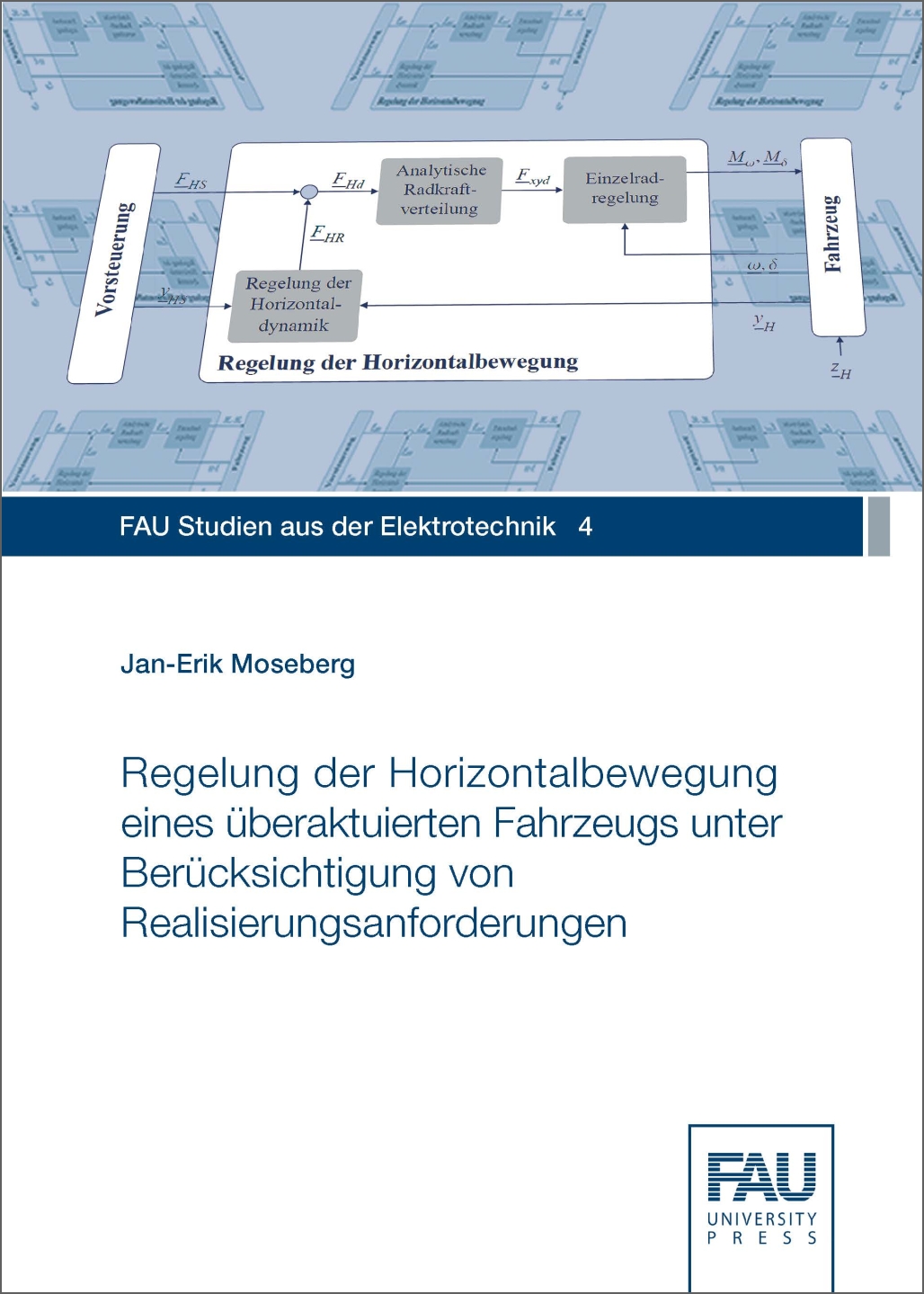
In diesem Kontext befasst sich die vorliegende Arbeit mit dem Entwurf und der Analyse einer ganzheitlichen Vorsteuerungs- und Regelungsstruktur für die Horizontalbewegung eines Fahrzeugs mit Einzelradaktorik. Sie basiert auf einem strukturierten, pragmatischen Fahrzeugmodell zur Beschreibung des Bewegungsverhaltens bis in den nichtlinearen Grenzbereich. Um Führungs- und Störverhalten der geregelten Horizontalbewegung unabhängig voneinander auslegen zu können und eine komponentenweise Problembetrachtung zu ermöglichen, ist eine modulare Zwei-Freiheitsgrade-Struktur gewählt. Die Auslegung der Vorsteuerung geschieht unter Berücksichtigung der durch die Einzelradaktorik vorhandenen Freiheiten der horizontalen Fahrzeugbewegung. Die Regelung besitzt Kaskadenstruktur, wobei die innere Regelschleife die Radbewegungen stabilisiert, während die äußere Kaskade den Fahrer beim Führen des Fahrzeugs unterstützt.
Die Überaktuierung des Fahrzeugs dient der Erhöhung der Fahrsicherheit, indem die Kraftschlussausnutzungen zwischen den vier Reifen und der Fahrbahn verringert werden. Die Lösung des zugrunde liegenden Optimierungsproblems erfolgt auf analytischem Wege, sodass der Rechenaufwand verhältnismäßig gering ausfällt, was einen Echtzeitbetrieb ermöglicht. Darüber hinaus wird die Redundanz der Stelleingriffe dazu genutzt, die funktionale Sicherheit des Gesamtfahrzeugs bei Vorhandensein fehlerhafter Stellglieder zu gewährleisten.
Die Funktionsfähigkeit des Steuerungs- und Regelungskonzepts und dessen Eignung zur Verbesserung der Fahrsicherheit werden analysiert und anhand von Simulationen verschiedener Fahrmanöver nachgewiesen. Die Tauglichkeit für den Einsatz in einem realen Versuchsträger zeigt sich in diesem Zusammenhang durch Verwendung eines realitätsnahen virtuellen Versuchsfahrzeugs.
Bewertungen
Es gibt noch keine Bewertungen.