Description
Current developments in the automotive sector, i.e. the proceeding electrification and the foreseeable introduction of the X-by-wire technology in road vehicles, motivate the examination of vehicles with single-wheel actuators. Equipping every single wheel with its own driving, braking, and steering system results in an over-actuated vehicle. Thus, an individual adjustment of all eight tire forces becomes possible to influence the three degrees of freedom of the horizontal vehicle motion. Therefore, additional control objectives can be realized besides the desired motion trajectory, like the maximization of driving safety. Taking account of the complexity of the resulting overall system, model-based design methods are expedient and also allow for the consideration of application-relevant problems.
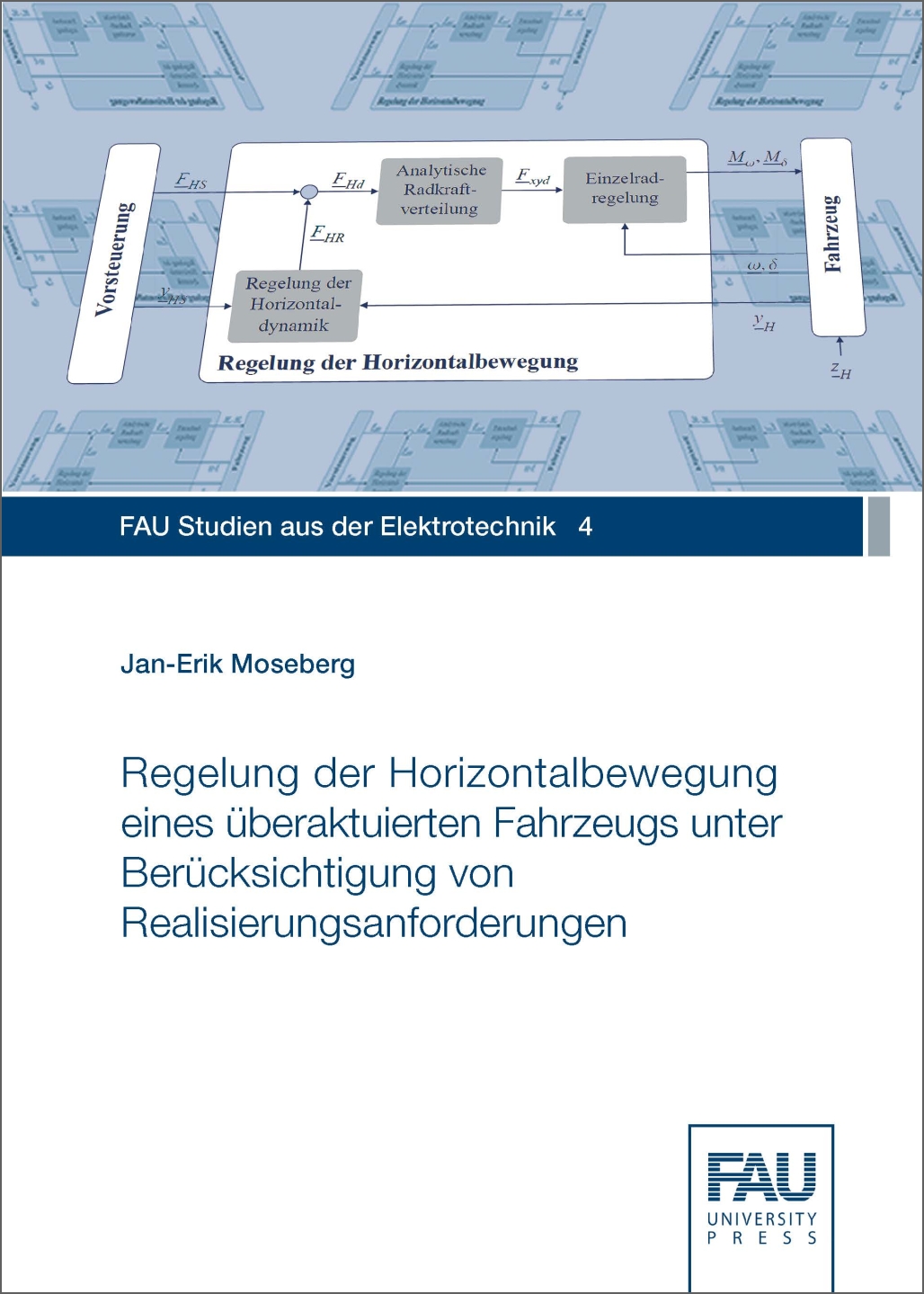
In this context, the thesis at hand presents an integrated feedforward and feedback control concept for the horizontal motion of a vehicle with single-wheel actuators. Its main objective is the realization of a desired motion trajectory determined by the driver despite external disturbances and model uncertainties. The over-actuation of the system is utilized to increase the driving safety and to compensate the impact of defective wheel actuators by reallocating the tire forces. In order to facilitate the controller application in a real vehicle, the real-time capability of the control algorithm, the required measurements for control purposes, and the adhesion limits of the tires are taken into account.
To achieve both good reference tracking and good disturbance rejection, a two-degree-of-freedom control structure is utilized.
The performance of the control concept is demonstrated thoroughly by numerical simulations of a detailed and realistic full vehicle model. In doing so, it becomes apparent that the control concept robustly stabilizes the horizontal vehicle motion, even in critical situations.
Reviews
There are no reviews yet.